Untersuchungen zur Echtzeit-Interaktivität mit Fabrikationsmaschinen
Komplexes Gestalten ab 3. Studienjahr BA/1. Studienjahr MA, Sommersemester 2021, Prof. Christian Zöllner, WM Simon Maris
–

Ausstellung
ZUKÜNFTE – Material und Design von Morgen
Untersuchungen zur Echtzeit-Interaktivität mit Fabrikationsmaschinen
Komplexes Gestalten ab 3. Studienjahr BA/1. Studienjahr MA, Sommersemester 2021, Prof. Christian Zöllner, WM Simon Maris

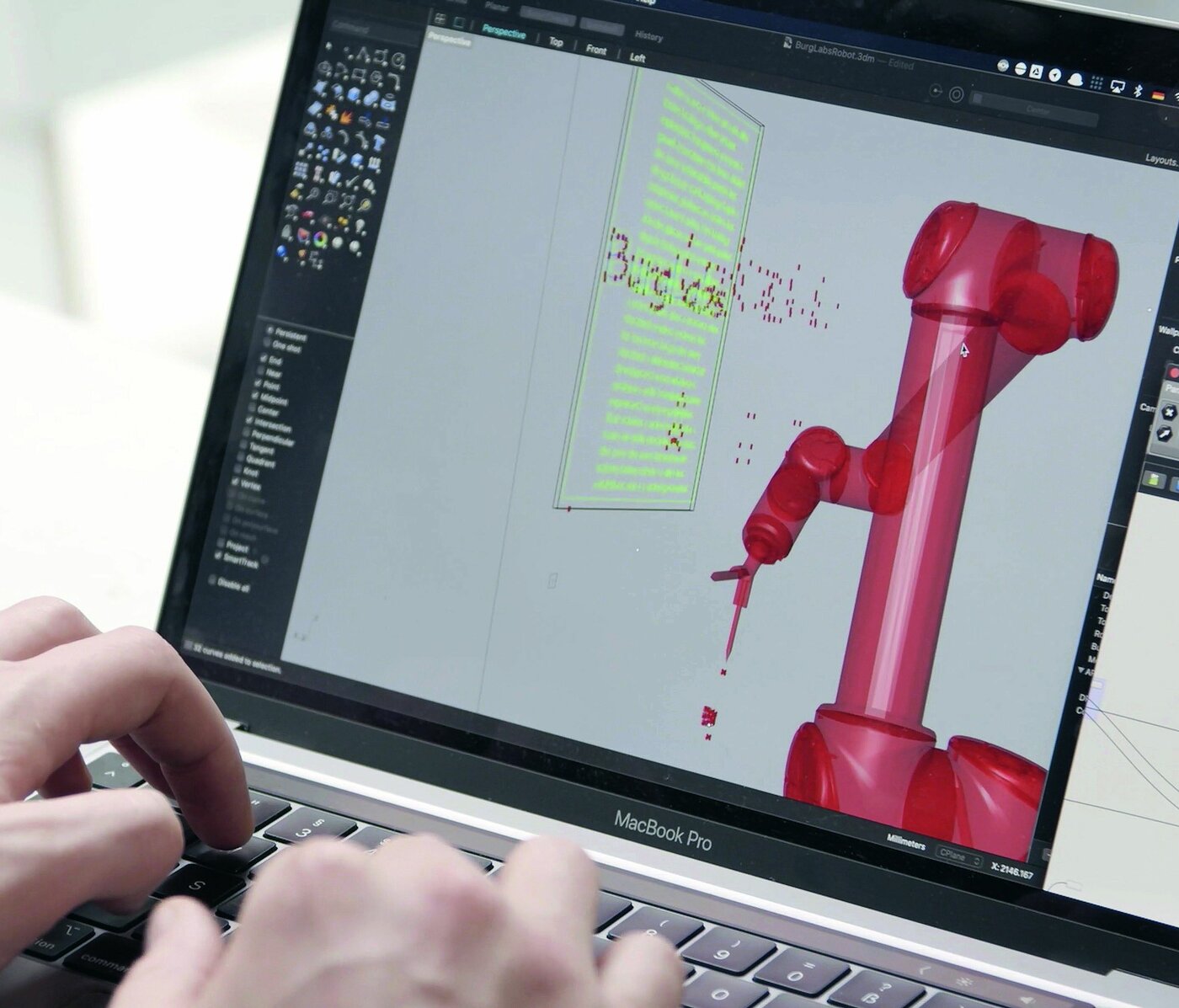

Um digitale Entwürfe und Modelle in die physische Welt zu bringen, sind Methoden und Werkzeuge der digitalen Fabrikation aus dem Design nicht mehr wegzudenken. Bisher wird hier vor allem "file-to-factory" betrieben, das heißt eine Ausrichtung des Designprozesses auf den Fabrikationsprozess.
Einerseits schränkt dies den Entwurfsprozess ein, andererseits verlieren wir dadurch die Möglichkeit in die Herstellung einzugreifen. Ein einmal gestarteter Prozess lässt sich nur abbrechen und neustarten, nicht verändern.
Diese bestehenden Softwaresteuerungen durch echtzeitbasierte Systeme zu ersetzten verspricht mehr Flexibilität und neue Gestaltungsräume.
In den Residencies sollen drei verschiedene Kontrollmechanismen exemplarisch und prototypisch untersucht werden:
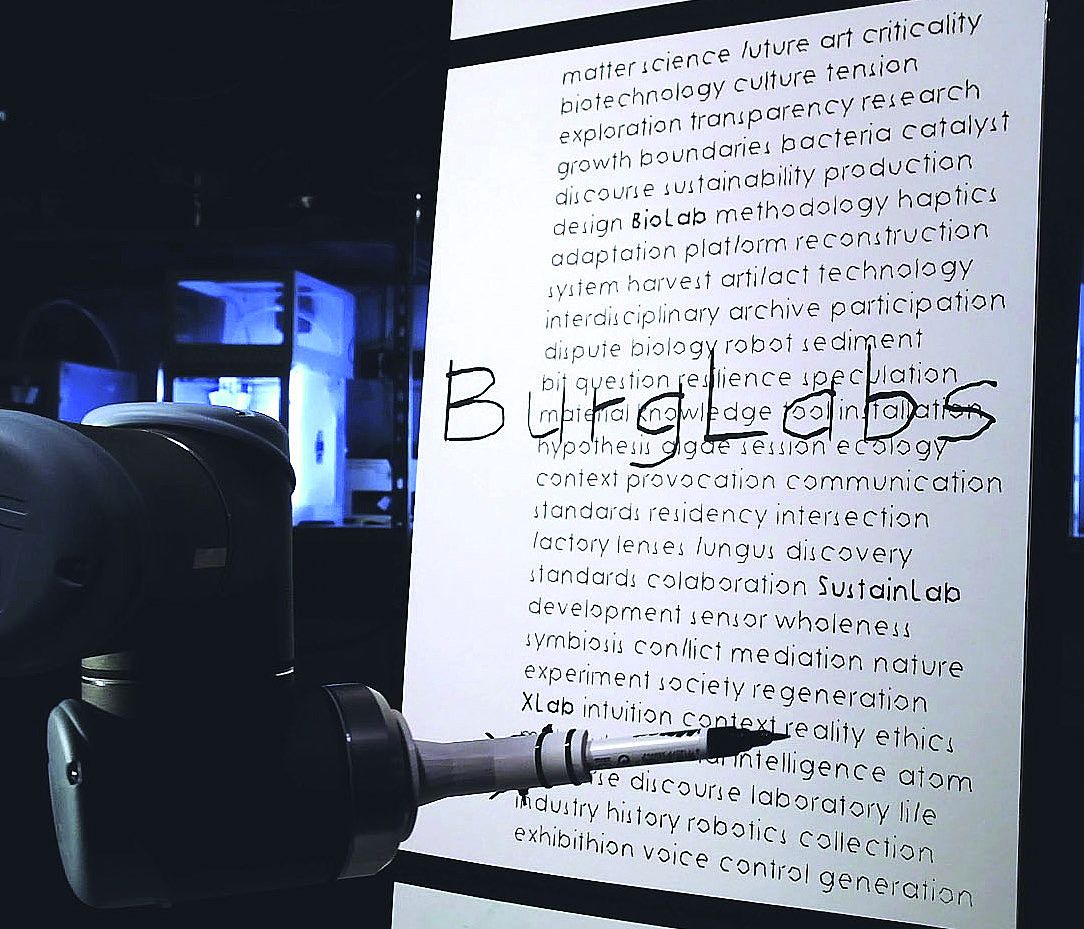
1. Haptische Steuerung
Die Integration von Gesten und Bewegungen verspricht eine schnelle und intuitive Möglichkeit, als Mensch in den Fabrikationsprozess einzugreifen.
2. Sensorische Steuerung
Die Integration von Sensoren verspricht eine flexible Reaktion auf externe Faktoren wie das verwendete Material oder die Produktionsbedingungen.
3. Neuronale Netzwerk Steuerung
Die Integration von neuronalen Netzwerken verspricht unter anderem eine flexible und automatisierte Anpassung von Fabrikationsdaten an veränderte Bedingungen.
Die verwendeten Materialien und Fabrikationsmaschinen (Universal Robots, 3D Drucker, CNC Fräse, …) sind nach Absprache in der Forschungsgruppe flexibel wählbar.
Ziel ist es, die jeweiligen Potentiale, Anwendungsbereiche und Grenzen der verschiedenen Kontrollmechanismen zu untersuchen und anhand von prototypischen Entwürfen zu demonstrieren.
Außerdem sollen die Ergebnisse durch die Forschungsgruppe gemeinsam verglichen und publiziert werden. Besonders spannend sind hierbei die Fragestellungen:
– Wie verändert sich durch diese neuen Möglichkeiten der Entwurfsprozess und welche neuen Methoden ergebne sich?
– In welchen Bereichen lassen sich diese Prozesse schon heute integrieren?
– Welche Hürden und Hindernisse sollten durch zukünftige Forschungsprojekte adressiert werden?
Aufgaben
Die Residency richtet sich an ID-Studierende und wird von Prof. Christian Zöllner betreut und bewertet. Alle Residents werden von Simon Maris (XLab) unterstützt. Eventuelle Kosten (insbesondere Hardware) können im Rahmen der Forschungsarbeit durch das XLab übernommen werden. Interessierte müssen sich mit bisherigen Arbeiten und einem Motivationsschreiben, das erste Vorstellungen und Ideen beinhaltet, auf die Residency bewerben. Die Verteilung der Schwerpunkte erfolgt gemeinsam in der Forschungsgruppe.
Vorraussetzung für alle ist Erfahrung mit digitalen Fabrikationsmaschinen sowie grundlegende Programmierkenntnisse, zumindest mit grafischen Programmierumgebungen. Die Bereitschaft, sich auch in komplexere technische Zusammenhänge einzuarbeiten, wird zur erfolgreichen Umsetzung unumgänglich sein. Das XLab steht selbstverständlich zur Verfügung und unterstützt diesen Prozess so gut wie möglich.
Schwerpunkt #1: Haptische Steuerung
Aufgabe ist es,
1. ein Szenario zu entwerfen, in dem die echtzeitbasierte Integration haptischer Informationen in den Fabrikationsprozess gut erforscht und demonstriert werden kann.
1. Mit welcher Maschine, in welchem Fabrikationsprozesses, mit welchem Material soll experimentiert werden?
2. Welche Art von Geste oder Bewegung eignet sich hierfür, wie kann diese erfasst und als Information verarbeitet werden?
3. Entwurf eines Demonstratorobjekts, an dem diese Integration sichtbar wird und persönliche Erfahrungen gemacht werden können.
2. die nötigen technischen Grundlagen in Hardware und Software zur Umsetzung zusammenzutragen.
3. das entwickelte Szenario prototypisch umzusetzen.
4. an der Dokumentation und Publikation mitzuwirken.
Schwerpunkt #2: Sensorische Steuerung
Aufgabe ist es,
1. ein Szenario zu entwerfen, in dem die echtzeitbasierte Integration sensorischer Informationen in den Fabrikationsprozess gut erforscht und demonstriert werden kann.
1. Mit welcher Maschine, in welchem Fabrikationsprozesses, mit welchem Material soll experimentiert werden?
2. Welche Art von Information über die Umgebung oder das Material soll erfasst werden, welche Sensorik eignet sich hierfür, und wie kann die Information verarbeitet werden?
3. Entwurf eines Demonstratorobjekts, an dem diese Integration sichtbar wird und persönliche Erfahrungen gemacht werden können.
2. die nötigen technischen Grundlagen in Hardware und Software zur Umsetzung zusammenzutragen.
3. das entwickelte Szenario prototypisch umzusetzen.
4. an der Dokumentation und Publikation mitzuwirken.
Schwerpunkt #3
Aufgabe ist es,
1. ein Szenario zu entwerfen, in dem die echtzeitbasierte Integration eines neuronalen Netzwerks in den Fabrikationsprozess gut erforscht und demonstriert werden kann.
1. Mit welcher Maschine, in welchem Fabrikationsprozesses, mit welchem Material soll experimentiert werden?
2. Welche Funktion soll das neuronale Netzwerk übernehmen? Entwerfend, kontrollierend, anpassend? An welcher Stelle und wie greift es in den Fabrikationsprozess ein?
3. Entwurf eines Demonstratorobjekts, an dem diese Integration sichtbar wird und persönliche Erfahrungen gemacht werden können.
2. die nötigen technischen Grundlagen in Hardware und Software zur Umsetzung zusammenzutragen.
3. das entwickelte Szenario prototypisch umzusetzen.
4. an der Dokumentation und Publikation mitzuwirken.
Recommended Reading
- Ramsgaard Thomsen, Mette, Paul Nicholas, Martin Tamke, Sebastian Gatz, Yuliya Sinke, and Gabriella Rossi. ‘Towards Machine Learning for Architectural Fabrication in the Age of Industry 4.0’. _International Journal of Architectural Computing_ 18, no. 4 (December 2020): 335–52. [https://doi.org/10/ghthmd](https://doi.org/10/ghthmd).
- Jensen, Mads Brath, Isak Worre Foged, and Hans Jørgen Andersen. ‘A Framework for Interactive Human–Robot Design Exploration’. _International Journal of Architectural Computing_ 18, no. 3 (September 2020): 235–53. [https://doi.org/10.1177/1478077120911588](https://doi.org/10.1177/1478077120911588).
- Maierhofer, Mathias, Valentina Soana, Maria Yablonina, Seiichi Suzuki Erazo, Axel Körner, Jan Knippers, and Achim Menges. ‘Towards Cyber-Physical Design and Operation Processes of Adaptive and Interactive Bending-Active Systems’, n.d., 10.
- Brugnaro, Giulio, Ehsan Baharlou, Lauren Vasey, and Achim Menges. ‘An Adaptive Robotic Fabrication Process for Woven Structures’, n.d., 10.
- Pedersen, Jens; Narendrakrishnan Neythalath. ‘Augmented Drawn Construction Symbols: A Method for Ad Hoc Robotic Fabrication’. In _International Journal of Architectural Computing Vol. 18 - No. 3, 254-269_. CUMINCAD, 2020. [http://papers.cumincad.org/cgi-bin/works/paper/ijac202018303](http://papers.cumincad.org/cgi-bin/works/paper/ijac202018303).
Further Reading
- Das, Avishek, Isak Worre Foged, and Mads Brath Jensen. ‘Designing with a Robot: Interactive Methods for Brick Wall Design Using Computer Vision’. In _Anthropologic - Architecture and Fabrication in the Cognitive Age: The 38th Conference on Education and Research in Computer Aided Architectural Design in Europe_, 605–12. eCAADe, 2020. [https://vbn.aau.dk/en/publications/designing-with-a-robot-interactive-methods-for-brick-wall-design-](https://vbn.aau.dk/en/publications/designing-with-a-robot-interactive-methods-for-brick-wall-design-).
- Das, Avishek, Isak Worre Foged, Mads Brath Jensen, and Michael Natapon Hansson. ‘Collaborative Robotic Masonry and Early Stage Fatigue Prediction’. In _Architecture in the Age of the 4th Industrial Revolution: Proceedings of the 37th ECAADe and 23rd SIGraDi Conference_, 171–78. University of Porto, 2019. [https://vbn.aau.dk/en/publications/collaborative-robotic-masonry-and-early-stage-fatigue-prediction](https://vbn.aau.dk/en/publications/collaborative-robotic-masonry-and-early-stage-fatigue-prediction).
- Garcia del Castillo y López, Jose Luis. ‘Robot Ex Machina’. In _ACADIA 19:UBIQUITY AND AUTONOMY \[Proceedings of the 39th Annual Conference of the Association for Computer Aided Design in Architecture (ACADIA) ISBN 978-0-578-59179-7\] (The University of Texas at Austin School of Architecture, Austin, Texas 21-26 October, 2019) Pp. 40-49_. CUMINCAD, 2019. [http://papers.cumincad.org/cgi-bin/works/paper/acadia19\_40](http://papers.cumincad.org/cgi-bin/works/paper/acadia19_40).
- Jensen, Mads Brath. ‘Robotic Fabrication of Acoustic Geometries: An Explorative and Creative Design Process within an Educational Context’. _Archi-DOCT - The e-Journal for the Dissemination of Doctoral Research in Architecture_ 6, no. 2 (February 2019): 34–45.
- Jensen, Mads Brath, and Avishek Das. ‘Technologies and Techniques for Collaborative Robotics in Architecture: Establishing a Framework for Human-Robotic Design Exploration’. In _RE: Anthropocene: Proceedings of the 25th International Conference of the Association for Computer-Aided Architectural Design Research in Asia (CAADRIA) 2020_, 292–303. Chulalongkorn University, Thailand, 2020. [https://vbn.aau.dk/en/publications/technologies-and-techniques-for-collaborative-robotics-in-archite](https://vbn.aau.dk/en/publications/technologies-and-techniques-for-collaborative-robotics-in-archite).
- López, Jose Luis García del Castillo y. ‘Machina.NET: A Library for Programming and Real-Time Control of Industrial Robots’. _Journal of Open Research Software_ 7, no. 1 (13 August 2019): 27. [https://doi.org/10/ghtfr4](https://doi.org/10/ghtfr4).
- Poustinchi, Ebrahim. ‘Oriole Beta A Parametric Solution for Robotic Motion Design Using Animation’. In _Blucher Design Proceedings_, 227–34. Porto, Portugal: Editora Blucher, 2019. [https://doi.org/10/ghtg8b](https://doi.org/10/ghtg8b).
- Reinhardt, Dagmar. ‘Design Robotics Towards Human-Robot Timber Module Assembly’. In _Blucher Design Proceedings_, 211–16. Porto, Portugal: Editora Blucher, 2019. [https://doi.org/10/ghtg7g](https://doi.org/10/ghtg7g).
- Reinhardt, Dagmar, M. Hank Haeusler, Lian Loke, Eduardo de Oliveira Barata, Charlotte Firth, Nariddh Khean, Kerry London, Yingbin Feng, and Rodney Watt. ‘CoBuilt Towards a Novel Methodology for Workflow Capture and Analysis of Carpentry Tasks for Human-Robot Collaboration’. In _Blucher Design Proceedings_, 207–16. Porto, Portugal: Editora Blucher, 2019. [https://doi.org/10/ghtfrh](https://doi.org/10/ghtfrh).
- Rossi, Gabriella, and Paul Nicholas. ‘Haptic Learning Towards Neural-Network-Based Adaptive Cobot Path-Planning for Unstructured Spaces’. In _Blucher Design Proceedings_, 201–10. Porto, Portugal: Editora Blucher, 2019. [https://doi.org/10/ghtg8f](https://doi.org/10/ghtg8f).
- Wei, Likai, La Ta, Liang Li, Yang Han, Yingying Feng, Xin Wang, and Zhen Xu. ‘RAF: Robot Aware Fabrication Hand-Motion Augmented Robotic Fabrication Workflow and Case Study’. In _Blucher Design Proceedings_, 241–50. Porto, Portugal: Editora Blucher, 2019. [https://doi.org/10/ghtg78](https://doi.org/10/ghtg78).
- Wibranek, Bastian, Boris Belousov, Alymbek Sadybakasov, Jan Peters, and Oliver Tessmann. ‘Interactive Structure Robotic Repositioning of Vertical Elements in Man-Machine Collaborative Assembly through Vision-Based Tactile Sensing’. In _Blucher Design Proceedings_, 705–14. Porto, Portugal: Editora Blucher, 2019. [https://doi.org/10/ghtg7b](https://doi.org/10/ghtg7b).
- Zhang, Ye, Kun Zhang, KaiDi Chen, and Zhen Xu. ‘Source Material Oriented Computational Design and Robotic Construction’, n.d., 10.

















Industriedesign
Industrial Design
Spiel- und Lerndesign
Design of Playing and Learning
Product Design and Design of Porcelain, Ceramics and Glass
Produktdesign/ Keramik- und Glasdesign



